Urb3DCD-v2
Notes on the Dataset
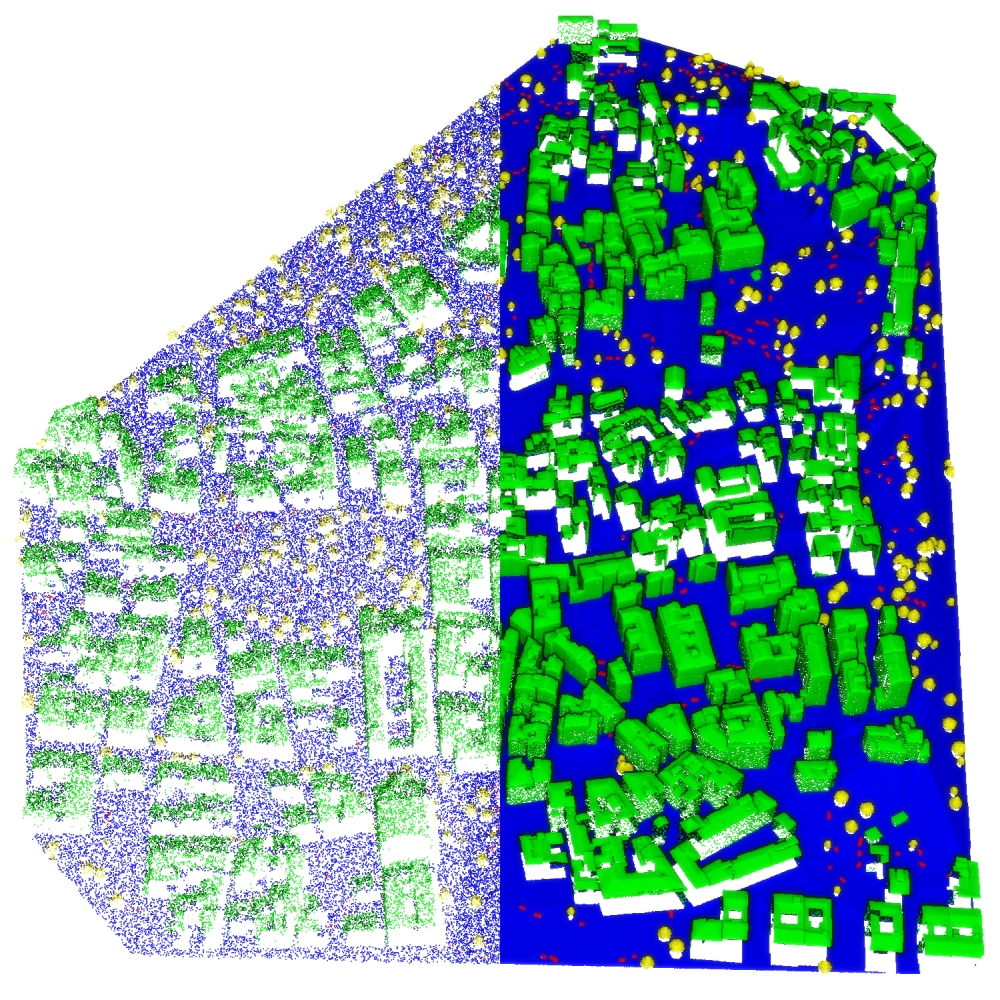
- There are multiple point cloud pairs for the three scenes, whereas each point cloud is unique in the buildings recorded, as well as noise, density, and scanning angle. However, the point cloud pairs follow no chronology, i.e., the change labels are only valid within a point cloud pair.
Detailed Information
| General Information | |
| Name | Urb3DCD-v2 |
| Release Year | 2023 |
| Terms of Use | CC BY 4.0 |
| Access Requirements | Create account |
| Dataset Size | 474 MB |
| Documentation | Multi-paragraph description of the dataset, e.g., in the form of a paper section or a comprehensive readme file |
| Code | Yes |
| Applications | Built environment change detection and classification |
| Detailed Applications | Urban point cloud change detection |
| Acquisition | |
| Number of Scenes | 30 |
| Number of Epochs per Scene (minimum) | 2 |
| Number of Epochs per Scene (median) | 2 |
| Number of Epochs per Scene (maximum) | 2 |
| General Scene Type | Urban |
| Specific Scene Type | City district |
| Location | Lyon (France) |
| Acquisition Type | Airborne laser scanning | Synthetic scan |
| Acquisition Device | Simulated ALS |
| Acquisition Platform | Simulated (aircraft) |
| Scan Interval | Undefined |
| Acquisition Months | |
| Representation | |
| Data Representation | Unstructured, globally aligned (e.g., point cloud or ray cloud) |
| Specific Data Representation | Point cloud |
| File Format/Encoding | PLY |
| Raw Data | - |
| Additional Data | Simulation parameters |
| Coordinate System | 9827 |
| Quality and Usability | |
| Registration | Finely registered |
| Number of Partial Epochs | - |
| Unusable Data Reason | - |
| Splits | Yes |
| Per-Point Attributes | |
| Intensity/Reflectivity | No |
| Color | No |
| Semantic Labels | 4 |
| Instance Labels | No |
| Change Labels | 7 |
| Statistics | |
| Number of Points per Epoch (minimum) | 149K |
| Number of Points per Epoch (median) | 205K |
| Number of Points per Epoch (maximum) | 6M |
| Avg. Point Spacing (minimum) | 1.5dm |
| Avg. Point Spacing (median) | 1.2m |
| Avg. Point Spacing (maximum) | 1.3m |
| Avg. Change Points per Epoch | 16.62% |
Paper Reference 1
@article{degelis2023dataseturb3dcdv2,
author = {Iris de~G\'elis and Sébastien Lefèvre and Thomas Corpetti},
title = {Siamese KPConv: 3D multiple change detection from raw point clouds using deep learning},
journal = {ISPRS Journal of Photogrammetry and Remote Sensing},
volume = {197},
pages = {274--291},
year = {2023},
issn = {0924-2716},
doi = {10.1016/j.isprsjprs.2023.02.001},
}
Dataset Reference 1
@data{degelis2021dataseturb3dcd,
doi = {10.3390/rs13132629},
author = {de Gélis, Iris and Lefèvre, Sébastien and Corpetti, Thomas},
publisher = {IEEE Dataport},
title = {Urb3DCD : Urban Point Clouds Simulated Dataset for 3D Change Detection},
year = {2021},
}