Underwood et al.
Notes on the Dataset
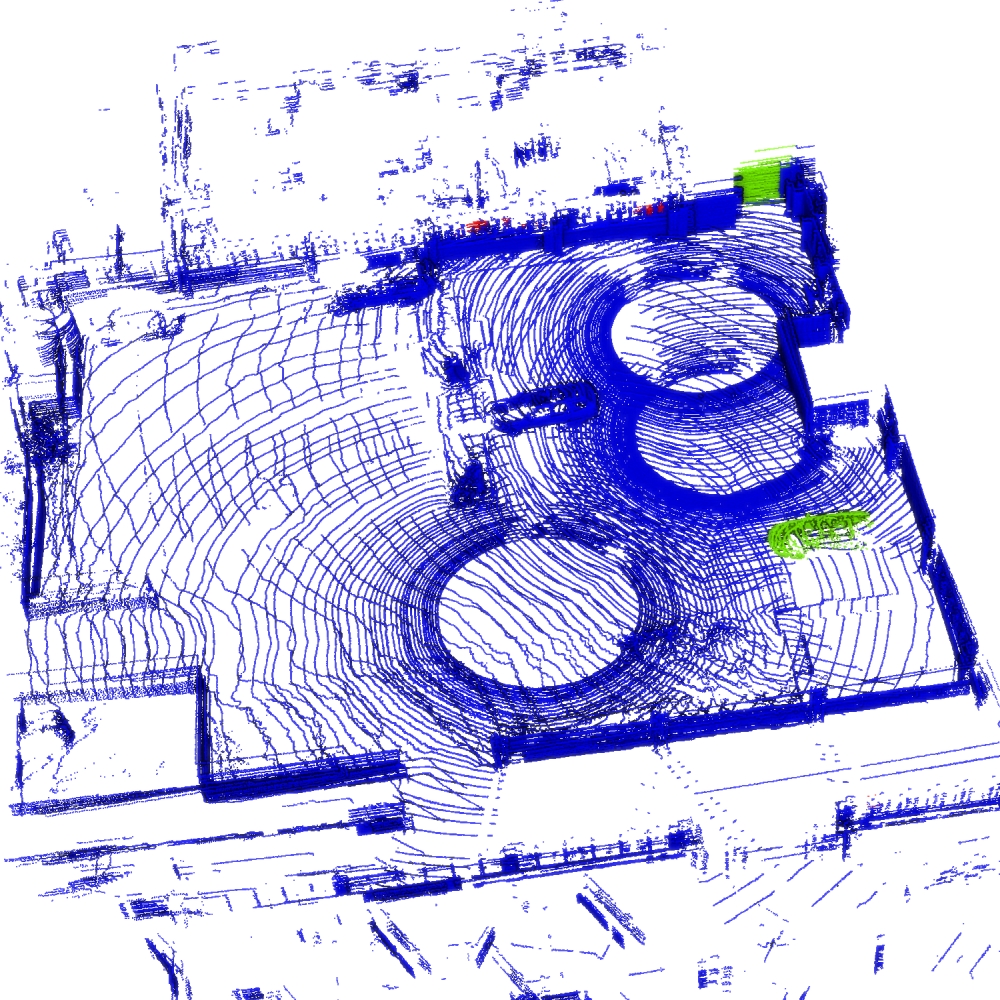
- Each epoch is scanned from different positions that can be fused into one point cloud.
- In contrast to the other scenes, for the "sim" scene the y-axis faces upwards, which get corrected when applying the given pose.
Detailed Information
| General Information | |
| Name | Underwood et al. |
| Release Year | 2013 |
| Terms of Use | Unclear |
| Access Requirements | None |
| Dataset Size | 365.7 MB |
| Documentation | Between medium-length (multi-paragraph) and short (multi-line) description. The reviewers disagreed on this |
| Code | Yes |
| Applications | Built environment change detection and classification |
| Detailed Applications | 3D change detection considering different sensor positions (and therefore occlusions) |
| Acquisition | |
| Number of Scenes | 3 |
| Number of Epochs per Scene (minimum) | 2 |
| Number of Epochs per Scene (median) | 2 |
| Number of Epochs per Scene (maximum) | 4 |
| General Scene Type | Built |
| Specific Scene Type | Carpark | lab |
| Location | Unclear |
| Acquisition Type | Terrestrial laser scanning |
| Acquisition Device | Simulation and Velodyne HDL64ES2 |
| Acquisition Platform | Unclear |
| Scan Interval | Minutes |
| Acquisition Months | |
| Representation | |
| Data Representation | Unstructured, local (e.g., local point clouds or laser scans with poses) |
| Specific Data Representation | Local point clouds |
| File Format/Encoding | Textfile, usually delimiter separated values |
| Raw Data | - |
| Additional Data | - |
| Coordinate System | m |
| Quality and Usability | |
| Registration | Finely registered |
| Number of Partial Epochs | - |
| Unusable Data Reason | - |
| Splits | No |
| Per-Point Attributes | |
| Intensity/Reflectivity | No |
| Color | No |
| Semantic Labels | - |
| Instance Labels | No |
| Change Labels | 3 |
| Statistics | |
| Number of Points per Epoch (minimum) | 194K |
| Number of Points per Epoch (median) | 1M |
| Number of Points per Epoch (maximum) | 1M |
| Avg. Point Spacing (minimum) | 6.0mm |
| Avg. Point Spacing (median) | 7.9mm |
| Avg. Point Spacing (maximum) | 2.2dm |
| Avg. Change Points per Epoch | 1.01% |
Paper Reference 1
@inproceedings{underwood2013changedetectiondataset,
author = {James Patrick Underwood and
D. Gillsjo and
Tim Bailey and
Vsevolod Vlaskine},
title = {Explicit 3D change detection using ray-tracing in spherical coordinates},
booktitle = {IEEE International Conference on Robotics and Automation, Karlsruhe,
Germany, May 6-10, 2013},
pages = {4735--4741},
year = {2013},
doi = {10.1109/ICRA.2013.6631251},
}