USyd Campus
Notes on the Dataset
- Originally, a web page was available for the dataset, describing its use in more detail. However, the website is not available anymore. Part of it can be accessed through the Internet Archive.
- A code release is available for the dataset. The code is a bit hard to find, as the original dataset web page where the code was linked no longer exists.
- The zip archives for the weeks 30, 33, and 34 appear to be corrupted. The ROS bag files can not be extracted properly.
- While a number of semantically labeled images are available, they are not matched to acquisition times and corresponding LiDAR scans. Therefore, these images can not be used for projecting semantic labels to the point cloud.
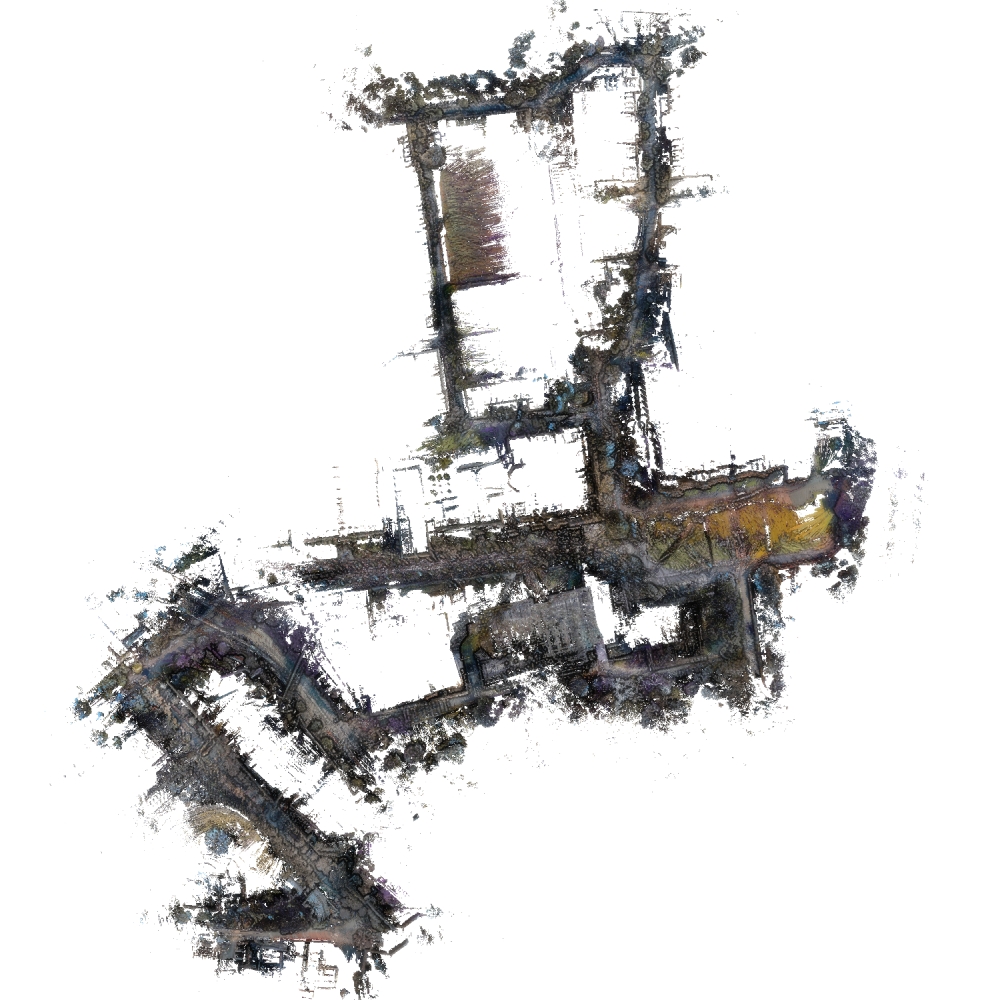
- Although poses are provided for the LiDAR scans, the resulting point cloud is quite noisy (also due to many moving objects) and exihibts significant drift. In the initial part of the route, to which the vehicle returns at the end, height discrepancies of 100-200 meters can occur between the start and end position. More accurate results could be achieved by employing a SLAM approach to compute more precise poses and achieve proper loop closure.
Detailed Information
| General Information | |
| Name | USyd Campus |
| Release Year | 2019 |
| Terms of Use | CC BY 4.0 |
| Access Requirements | Create account |
| Dataset Size | 719.99 GB | Partial download is possible, i.e. the data is split into several files (e.g., epochs or data types) |
| Documentation | In-depth documentation of acquisition and characteristics of the dataset, e.g., via an explicit dataset paper or a comprehensive multi-page metadata document |
| Code | Yes |
| Applications | Long-term localization and mapping |
| Detailed Applications | Long-term localization | mapping maintenance | segmentation validation |
| Acquisition | |
| Number of Scenes | 1 |
| Number of Epochs per Scene (minimum) | 49 |
| Number of Epochs per Scene (median) | 49 |
| Number of Epochs per Scene (maximum) | 49 |
| General Scene Type | Urban |
| Specific Scene Type | University campus |
| Location | University of Sydney (Australia) |
| Acquisition Type | Mobile laser scanning |
| Acquisition Device | Velodyne Puck VLP-16 |
| Acquisition Platform | Electric vehicle |
| Scan Interval | Weeks |
| Acquisition Months | Janurary: 1 February: 4 March: 8 April: 8 May: 4 June: 4 July: 5 August: 4 September: 4 October: 2 November: 4 December: 1 |
| Representation | |
| Data Representation | Unstructured, local (e.g., local point clouds or laser scans with poses) |
| Specific Data Representation | Local point clouds |
| File Format/Encoding | ROS bag |
| Raw Data | - |
| Additional Data | GPS | IMU |
| Coordinate System | GPS data is available but, the poses themselves are local with meters as unit |
| Quality and Usability | |
| Registration | Not registered |
| Number of Partial Epochs | 2.08% |
| Unusable Data Reason | Errorneous |
| Splits | No |
| Per-Point Attributes | |
| Intensity/Reflectivity | Yes |
| Color | Yes | Color is not naturally included, but images are available that could be backprojected |
| Semantic Labels | - |
| Instance Labels | No |
| Change Labels | - |
| Statistics | |
| Number of Points per Epoch (minimum) | 79M |
| Number of Points per Epoch (median) | 199M |
| Number of Points per Epoch (maximum) | 250M |
| Avg. Point Spacing (minimum) | 3.4cm |
| Avg. Point Spacing (median) | 4.0cm |
| Avg. Point Spacing (maximum) | 4.6cm |
| Avg. Change Points per Epoch | - |
Paper Reference 1
@article{zhou2020usydcampus,
author = {Zhou, Wei and Berrio, Julie Stephany and De Alvis, Charika and Shan, Mao and Worrall, Stewart and Ward, James and Nebot, Eduardo},
journal = {IEEE Intelligent Transportation Systems Magazine},
title = {Developing and Testing Robust Autonomy: The University of Sydney Campus Data Set},
year = {2020},
volume = {12},
number = {4},
pages = {23--40},
keywords = {Autonomous vehicles;Laser radar;Cameras;Sensors;Semantics;Robustness;Data collection},
doi = {10.1109/MITS.2020.2990183},
}
Dataset Reference 1
@misc{zhou2019datasetusydcampus,
doi = {10.21227/sk74-7419},
author = {Zhou, Wei and Berrio Perez, Julie Stephany and De Alvis, Charika and Shan, Mao and Worrall, Stewart and Ward, James and Nebot, Eduardo},
publisher = {IEEE Dataport},
title = {The USyd Campus Dataset},
year = {2019},
}