SZTAKI-CityCDLoc
Notes on the Dataset
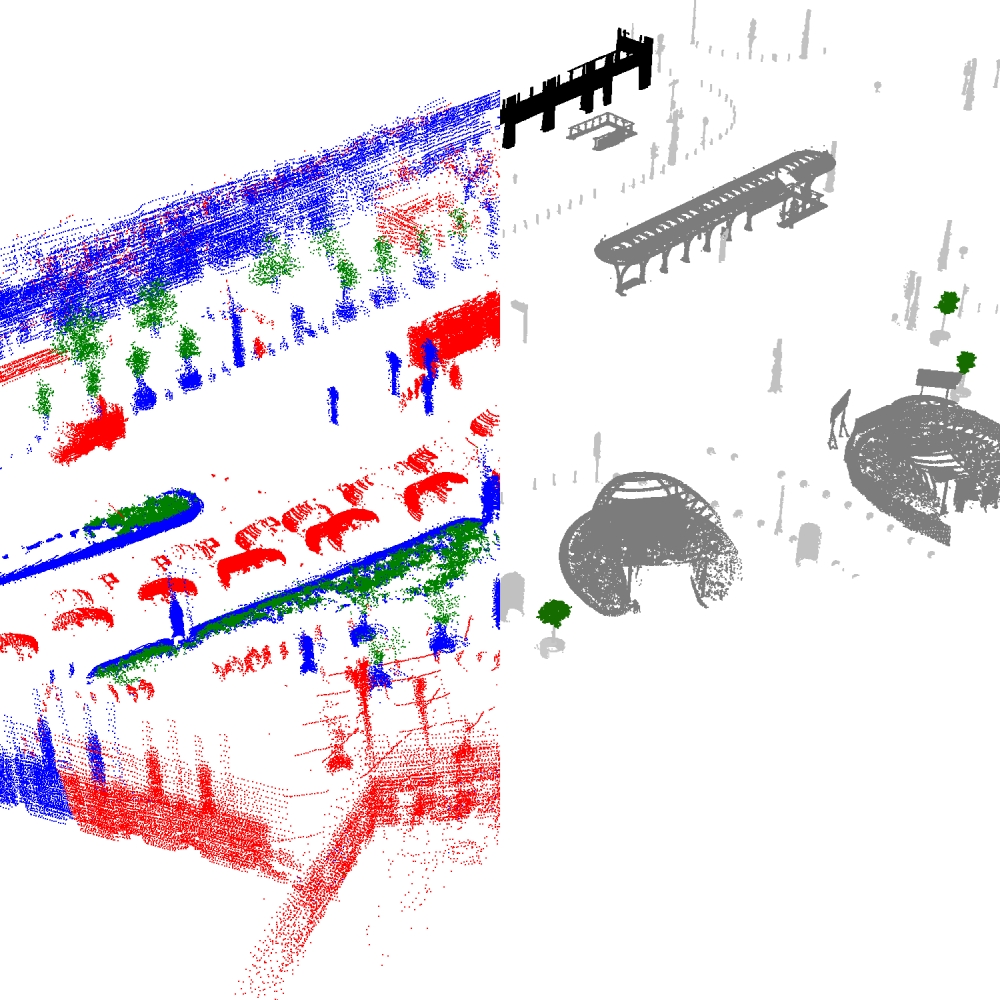
- The second epoch is split into multiple frames, from which some are available as sparser, but annotated variants (change labels + registration information). We only use the annotated data for computing the statistics (all frames fused into one point cloud).
- Semantic labels are only available for the first epoch.
Detailed Information
| General Information | |
| Name | SZTAKI-CityCDLoc |
| Release Year | 2022 |
| Terms of Use | Unclear |
| Access Requirements | None |
| Dataset Size | 558.2 MB |
| Documentation | Between extensive (multi-page document) and medium-length (multi-paragraph) description. The reviewers disagreed on this |
| Code | Yes |
| Applications | Multi-temporal registration | Built environment change detection and classification |
| Detailed Applications | Urban multimodal point cloud registration and change detection |
| Acquisition | |
| Number of Scenes | 3 |
| Number of Epochs per Scene (minimum) | 2 |
| Number of Epochs per Scene (median) | 2 |
| Number of Epochs per Scene (maximum) | 2 |
| General Scene Type | Urban |
| Specific Scene Type | Street segment |
| Location | Budapest (Hungary) |
| Acquisition Type | Mobile laser scanning |
| Acquisition Device | Riegl VMX450 MLS and Velodyne HDL-64E |
| Acquisition Platform | Car |
| Scan Interval | Months | Educated guess by the authors |
| Acquisition Months | |
| Representation | |
| Data Representation | Unstructured, globally aligned (e.g., point cloud or ray cloud) |
| Specific Data Representation | Point cloud |
| File Format/Encoding | PCD |
| Raw Data | Local PCs |
| Additional Data | GPS |
| Coordinate System | 23700 |
| Quality and Usability | |
| Registration | Coarsely registered |
| Number of Partial Epochs | 66.66% |
| Unusable Data Reason | - |
| Splits | No |
| Per-Point Attributes | |
| Intensity/Reflectivity | No |
| Color | No |
| Semantic Labels | 3 | Only some point clouds/parts have labels |
| Instance Labels | No |
| Change Labels | 4 |
| Statistics | |
| Number of Points per Epoch (minimum) | 181K |
| Number of Points per Epoch (median) | 2M |
| Number of Points per Epoch (maximum) | 7M |
| Avg. Point Spacing (minimum) | 9.5mm |
| Avg. Point Spacing (median) | 4.4cm |
| Avg. Point Spacing (maximum) | 8.7cm |
| Avg. Change Points per Epoch | 61.39% |
Paper Reference 1
@article{zovathi2022datasetsztakicitycdloc,
title = {Point cloud registration and change detection in urban environment using an onboard Lidar sensor and MLS reference data},
journal = {International Journal of Applied Earth Observation and Geoinformation},
volume = {110},
pages = {102767},
year = {2022},
issn = {1569-8432},
doi = {10.1016/j.jag.2022.102767},
author = {Örkény Zováthi and Balázs Nagy and Csaba Benedek},
}