SZTAKI-Change3D
Notes on the Dataset
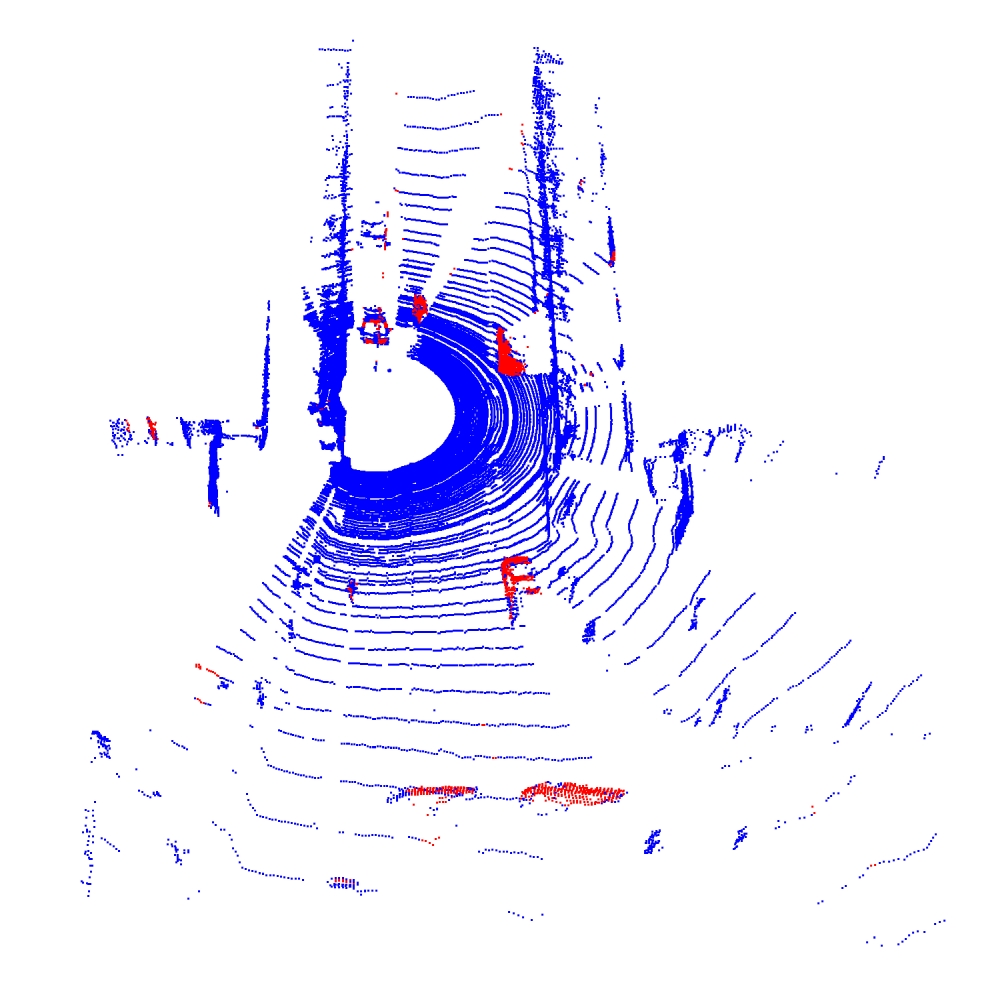
- Point clouds are from locations where a continously scanning vehicle was motionless for some time (traffic lights, parking, etc.). From these locations, pairs of point clouds were selected between which changes occured. In addition to these dynamic changes (pedestrians, vehicles), changes were synthesized by adding/removing street furniture, as well as random deletion of point cloud segments.
- The change is stored as two-channel binary mask, i.e., each point in epoch 1 and 2 receives a binary change label w.r.t. the other epoch. The image lattice is used for storing both channels in the same pixel, even though they might not represent the same point due to the coarse registration. A point is marked as changed if its surface patch is not present in the other epoch.
- The point clouds are purposefully not well registered. A small random offset and rotation was applied to each second epoch point cloud.
- Change labels are automatically generated and appear to be not very precise.
- It is not clearly specified, which of the two binary channels corresponds to which image.
- It is unclear, how to revert the range image to a point cloud, given that the point clouds are cropped at 5m vertical height before being mapped to the range image. We used the scanning angles from the HDL64-E scanner for reconstruction, as this specific scanner model was used for a later dataset from the same lab, possibly using similar acquisition hardware. However, the resulting point clouds are still slightly bent.
- The values in the label image are scaled to 60K with uneven stepsizes between the labels (18K = 1, 36K = 2, 60K = 3). This is probably due to the fact that the labels are stored together with the range images in a 16-bit format.
Detailed Information
| General Information | |
| Name | SZTAKI-Change3D |
| Release Year | 2021 |
| Terms of Use | Unclear |
| Access Requirements | None |
| Dataset Size | 430.1 MB |
| Documentation | Multi-paragraph description of the dataset, e.g., in the form of a paper section or a comprehensive readme file |
| Code | Yes |
| Applications | Built environment change detection and classification |
| Detailed Applications | Change detection in slightly unregistered datasets |
| Acquisition | |
| Number of Scenes | 1927 |
| Number of Epochs per Scene (minimum) | 2 |
| Number of Epochs per Scene (median) | 2 |
| Number of Epochs per Scene (maximum) | 2 |
| General Scene Type | Urban |
| Specific Scene Type | Street part |
| Location | Budapest (Hungary) |
| Acquisition Type | Mobile laser scanning |
| Acquisition Device | Velodyne HDL-64 |
| Acquisition Platform | Car |
| Scan Interval | Seconds | Educated guess by the authors |
| Acquisition Months | |
| Representation | |
| Data Representation | Structured, local (e.g., RGBD or range images with poses (and intrinsics) |
| Specific Data Representation | Range images |
| File Format/Encoding | PNG |
| Raw Data | - |
| Additional Data | - |
| Coordinate System | m |
| Quality and Usability | |
| Registration | Coarsely registered |
| Number of Partial Epochs | 8.04% |
| Unusable Data Reason | - |
| Splits | No |
| Per-Point Attributes | |
| Intensity/Reflectivity | No |
| Color | No |
| Semantic Labels | - |
| Instance Labels | No |
| Change Labels | 2 | The labels can be computed from other data/mapped to the point cloud, i.e., it can not trivially be done during point cloud construction (at least not for all epochs) |
| Statistics | |
| Number of Points per Epoch (minimum) | 58K |
| Number of Points per Epoch (median) | 79K |
| Number of Points per Epoch (maximum) | 99K |
| Avg. Point Spacing (minimum) | 3.0cm |
| Avg. Point Spacing (median) | 5.7cm |
| Avg. Point Spacing (maximum) | 7.2cm |
| Avg. Change Points per Epoch | 9.09% |
Paper Reference 1
@article{nagy2021datasetsztakichange3d,
author = {Nagy, Balázs and Kovács, Lóránt and Benedek, Csaba},
journal = {IEEE Robotics and Automation Letters},
title = {ChangeGAN: A Deep Network for Change Detection in Coarsely Registered Point Clouds},
year = {2021},
volume = {6},
number = {4},
pages = {8277--8284},
doi = {10.1109/LRA.2021.3105721},
}