NCLT
Notes on the Dataset
- According to Schaefer et al. ("Long-Term Urban Vehicle Localization Using Pole Landmarks Extracted from 3-D Lidar Scans", 2019), the provided ground truth poses are not very accurate. We confirmed that a better alignment can be achieved by employing current SLAM solutions (e.g., FasterLIO in our case).
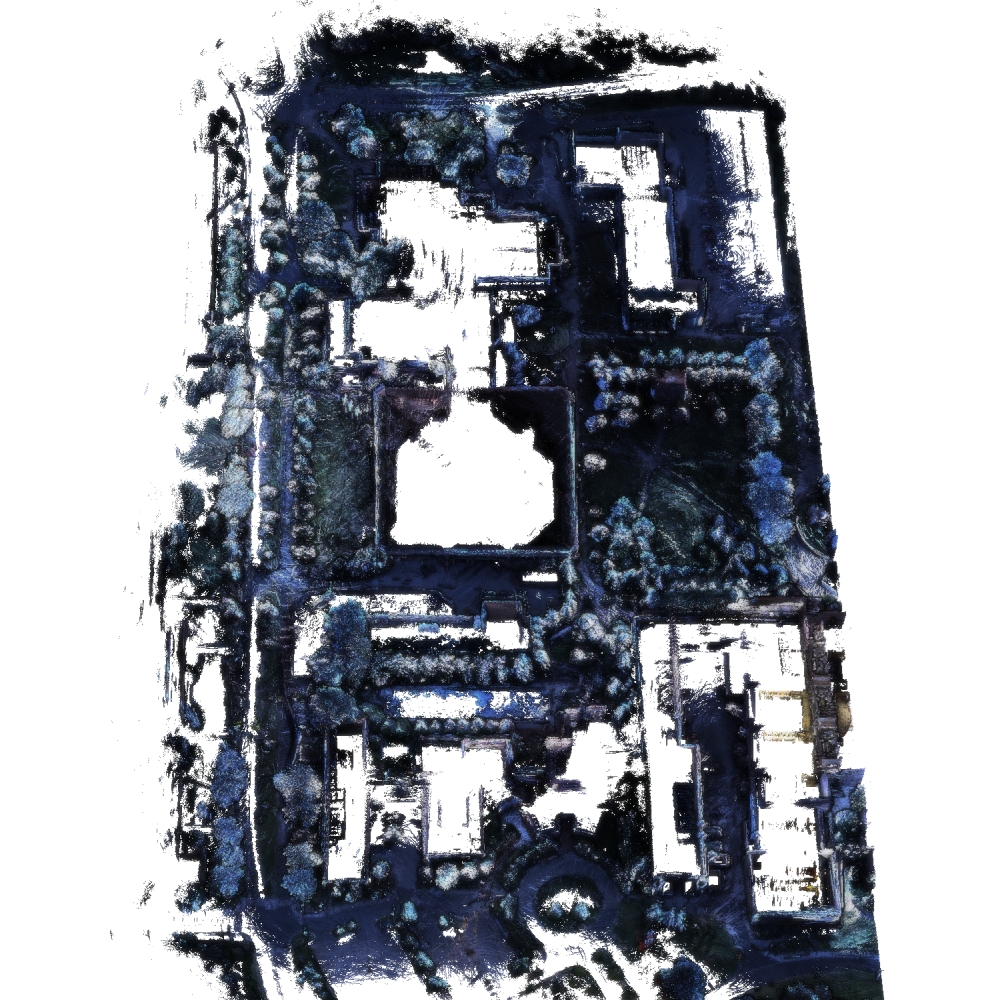
- Mapping the color images to the point cloud often results in the tip of trees receiving the color of the sky.
Detailed Information
| General Information | |
| Name | NCLT |
| Release Year | 2010 |
| Terms of Use | ODbl v1.0 |
| Access Requirements | None |
| Dataset Size | 3.13 TB | Partial download is possible, i.e. the data is split into several files (e.g., epochs or data types) |
| Documentation | In-depth documentation of acquisition and characteristics of the dataset, e.g., via an explicit dataset paper or a comprehensive multi-page metadata document |
| Code | Yes |
| Applications | Long-term localization and mapping |
| Detailed Applications | Long-term mapping/navigation/localization in changing environments |
| Acquisition | |
| Number of Scenes | 1 |
| Number of Epochs per Scene (minimum) | 27 |
| Number of Epochs per Scene (median) | 27 |
| Number of Epochs per Scene (maximum) | 27 |
| General Scene Type | Built |
| Specific Scene Type | Campus route |
| Location | University of Michigan, Ann Arbor (USA) |
| Acquisition Type | Mobile laser scanning |
| Acquisition Device | Velodyne HDL-32E |
| Acquisition Platform | Segway robotic platform |
| Scan Interval | Hours to Months |
| Acquisition Months | Janurary: 4 February: 7 March: 3 April: 2 May: 2 June: 1 July: 0 August: 2 September: 1 October: 1 November: 3 December: 1 |
| Representation | |
| Data Representation | Unstructured, local (e.g., local point clouds or laser scans with poses) |
| Specific Data Representation | Laser scans |
| File Format/Encoding | Binary |
| Raw Data | - |
| Additional Data | GPS | IMU |
| Coordinate System | GPS data is available but, the poses themselves are local with meters as unit |
| Quality and Usability | |
| Registration | Coarsely registered |
| Number of Partial Epochs | 34.62% |
| Unusable Data Reason | - |
| Splits | No |
| Per-Point Attributes | |
| Intensity/Reflectivity | Yes |
| Color | Yes | Color is not naturally included, but images are available that could be backprojected |
| Semantic Labels | - |
| Instance Labels | No |
| Change Labels | - |
| Statistics | |
| Number of Points per Epoch (minimum) | 340M |
| Number of Points per Epoch (median) | 2B |
| Number of Points per Epoch (maximum) | 3B |
| Avg. Point Spacing (minimum) | 1.8cm |
| Avg. Point Spacing (median) | 2.1cm |
| Avg. Point Spacing (maximum) | 2.5cm |
| Avg. Change Points per Epoch | - |
Paper Reference 1
@article{carlevaris2016datasetnclt,
author = { Nicholas Carlevaris-Bianco and Arash K. Ushani and Ryan M. Eustice },
title = { University of Michigan North Campus long-term vision and lidar dataset },
journal = { International Journal of Robotics Research },
year = { 2016 },
volume = { 35 },
number = { 9 },
pages = { 1023--1035 },
}