MHT Building
Notes on the Dataset
- The released dataset corresponds to the "laboratory dataset" described in the paper.
- The website states that "each rosbag with a 3D prefix contains a depth/color image, camera information, robot position, tf data, laser scan and person detection [...]" and "each rosbag with a 2D prefix contains AMCL position estimates, robot odometry, tf data and laser scans". Actually, the 3D rosbags contain depth and color images, robot poses, and laser scans, while the 2D rosbags contain robot poses and laser scans. No information is provided regarding camera intrinsics.
- The full download contains more data (two additional days) than the website lists as individual downloadable files. For these additional scans (3D_2013-08-22 and 3D_2013-08-23), four scan locations instead of three are recorded. However, the rosbags only contain color and depth images without poses.
- Some of the rosbags are corrupted (the ones with a ".active" file extension), probably due to the recording being terminated prematurely.
- The timestamps of the poses and images do not match, i.e., all timestamps of the images are outside the range of timestamps stored for the poses. However, there are always the same amount of images and poses, so we assume that they can be mapped to each other in their stored order.
Detailed Information
| General Information | |
| Name | MHT Building |
| Release Year | 2014 |
| Terms of Use | Unclear (Citation) |
| Access Requirements | None |
| Dataset Size | 35.7 GB | Partial download is possible, i.e. the data is split into several files (e.g., epochs or data types) |
| Documentation | Multi-paragraph description of the dataset, e.g., in the form of a paper section or a comprehensive readme file |
| Code | No |
| Applications | Long-term localization and mapping | Built environment change detection and classification |
| Detailed Applications | Long-term mapping | anomaly detection |
| Acquisition | |
| Number of Scenes | 3 |
| Number of Epochs per Scene (minimum) | 2966 |
| Number of Epochs per Scene (median) | 2968 |
| Number of Epochs per Scene (maximum) | 2969 |
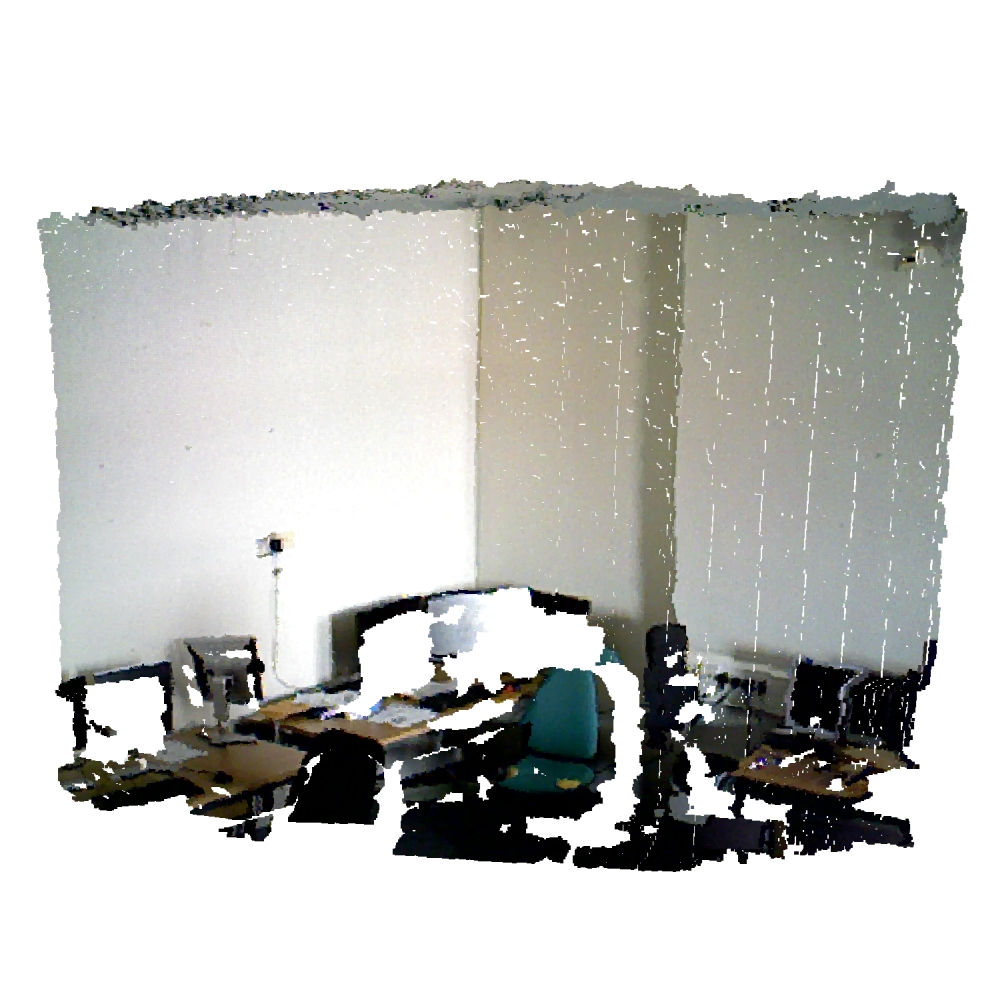
| General Scene Type | Indoor |
| Specific Scene Type | Office |
| Location | ATB Building, University of Lincoln (UK) |
| Acquisition Type | Depth camera mounted on vehicle |
| Acquisition Device | Asus Xtion RGB-D camera |
| Acquisition Platform | Scitos G5 robot |
| Scan Interval | Minutes |
| Acquisition Months | Janurary: 0 February: 0 March: 0 April: 0 May: 0 June: 0 July: 0 August: 4118 September: 4785 October: 0 November: 0 December: 0 |
| Representation | |
| Data Representation | Structured, local (e.g., RGBD or range images with poses (and intrinsics) |
| Specific Data Representation | Color and depth images |
| File Format/Encoding | ROS bag |
| Raw Data | - |
| Additional Data | Planar laser scans | person detections |
| Coordinate System | m |
| Quality and Usability | |
| Registration | Coarsely registered |
| Number of Partial Epochs | - |
| Unusable Data Reason | Errorneous |
| Splits | No |
| Per-Point Attributes | |
| Intensity/Reflectivity | No |
| Color | Yes |
| Semantic Labels | - |
| Instance Labels | No |
| Change Labels | - |
| Statistics | |
| Number of Points per Epoch (minimum) | 60K |
| Number of Points per Epoch (median) | 300K |
| Number of Points per Epoch (maximum) | 3M |
| Avg. Point Spacing (minimum) | 131µm |
| Avg. Point Spacing (median) | 7.2mm |
| Avg. Point Spacing (maximum) | 1.1cm |
| Avg. Change Points per Epoch | - |
Paper Reference 1
@inproceedings{krajnik2014datasetmhtbuilding,
author = {Krajnik, Tomas and Fentanes, Jaime Pulido and Cielniak, Grzegorz and Dondrup, Christian and Duckett, Tom},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
title = {Spectral analysis for long-term robotic mapping},
year = {2014},
pages = {3706--3711},
doi = {10.1109/ICRA.2014.6907396},
}