Boreas
Notes on the Dataset
- There are two different routes, but one route is only followed once in one of the (test) sequences.
- The route of the additional Boreas-Objects-V1 dataset does not seem to correspond to the other sequences.
- For 10 epochs, the ground thruth trajectory has not been released to facilitate a comparable, public benchmark.
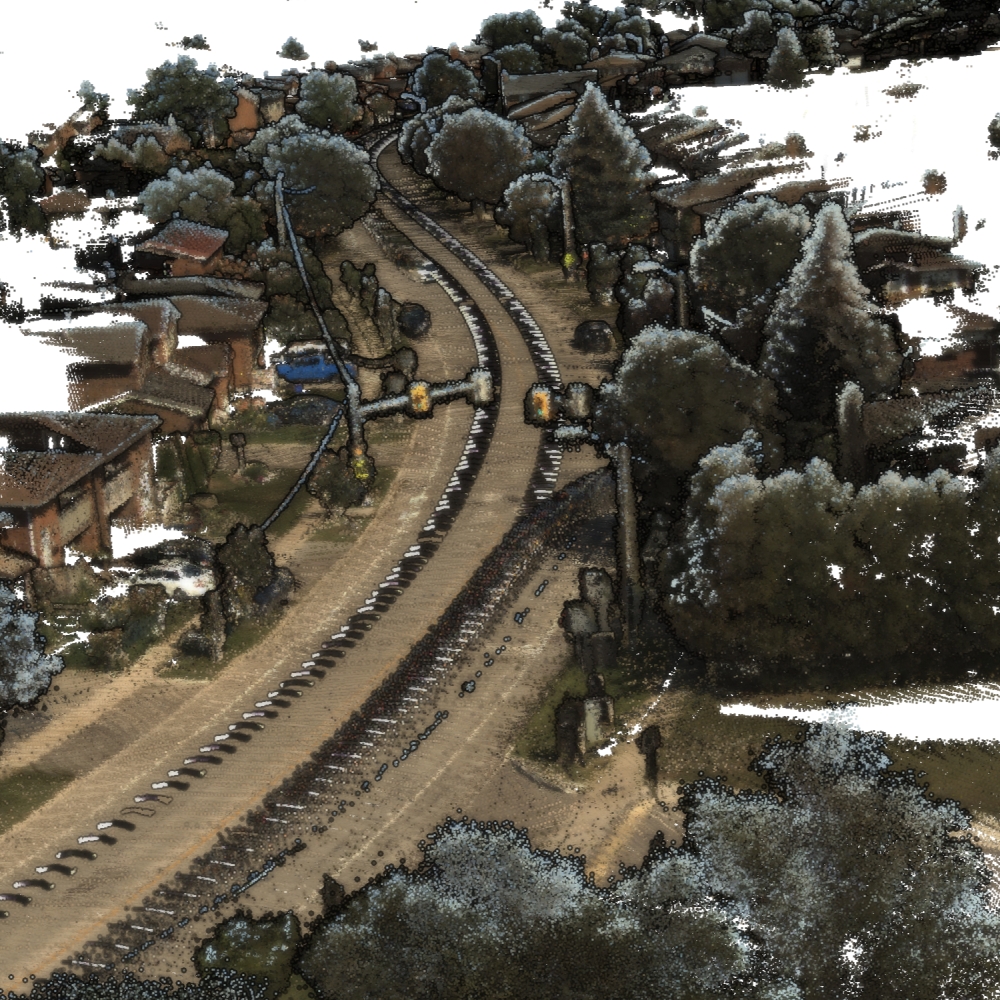
- The quality of the point clouds strongly depends on the weather during acquisition.
- The download website depicts the estimated download size and calculates with 100 GB per sequence. Many sequences actually have a lower size (~80 GB).
- In the pip version of pyboreas (the accompanying Python package for the dataset), the odom_train split erroneously contains `boreas-2021-04-29-15-55`, which however has no odometry data available.
Detailed Information
| General Information | |
| Name | Boreas |
| Release Year | 2023 |
| Terms of Use | CC BY 4.0 |
| Access Requirements | None |
| Dataset Size | 4.3 TB | Partial download is possible, i.e. the data is split into several files (e.g., epochs or data types) |
| Documentation | In-depth documentation of acquisition and characteristics of the dataset, e.g., via an explicit dataset paper or a comprehensive multi-page metadata document |
| Code | Yes |
| Applications | Long-term localization and mapping |
| Detailed Applications | Long-term localization and the effects of seasonal variation on it |
| Acquisition | |
| Number of Scenes | 1 |
| Number of Epochs per Scene (minimum) | 43 |
| Number of Epochs per Scene (median) | 43 |
| Number of Epochs per Scene (maximum) | 43 |
| General Scene Type | Urban |
| Specific Scene Type | City route |
| Location | Toronto (Canada) |
| Acquisition Type | Mobile laser scanning |
| Acquisition Device | Velodyne Alpha-Prime LiDAR |
| Acquisition Platform | Car |
| Scan Interval | Weeks |
| Acquisition Months | Janurary: 3 February: 1 March: 3 April: 5 May: 2 June: 2 July: 2 August: 1 September: 3 October: 2 November: 5 December: 2 |
| Representation | |
| Data Representation | Unstructured, local (e.g., local point clouds or laser scans with poses) |
| Specific Data Representation | Laser scans |
| File Format/Encoding | Binary |
| Raw Data | - |
| Additional Data | Radar | 3D bbox annotations for a subset |
| Coordinate System | GPS data is available but, the poses themselves are local with meters as unit |
| Quality and Usability | |
| Registration | Finely registered |
| Number of Partial Epochs | - |
| Unusable Data Reason | Not multi-temporal |
| Splits | Yes |
| Per-Point Attributes | |
| Intensity/Reflectivity | Yes |
| Color | Yes | Color is not naturally included, but images are available that could be backprojected |
| Semantic Labels | - |
| Instance Labels | No |
| Change Labels | - |
| Statistics | |
| Number of Points per Epoch (minimum) | 2B |
| Number of Points per Epoch (median) | 2B |
| Number of Points per Epoch (maximum) | 3B |
| Avg. Point Spacing (minimum) | 1.6cm |
| Avg. Point Spacing (median) | 1.8cm |
| Avg. Point Spacing (maximum) | 1.9cm |
| Avg. Change Points per Epoch | - |
Paper Reference 1
@article{burnett2023datasetboreas,
author = {Keenan Burnett and David J Yoon and Yuchen Wu and Andrew Z Li and Haowei Zhang and Shichen Lu and Jingxing Qian and Wei-Kang Tseng and Andrew Lambert and Keith YK Leung and Angela P Schoellig and Timothy D Barfoot},
title = {Boreas: A multi-season autonomous driving dataset},
journal = {The International Journal of Robotics Research},
volume = {42},
number = {1-2},
pages = {33--42},
year = {2023},
doi = {10.1177/02783649231160195},
}